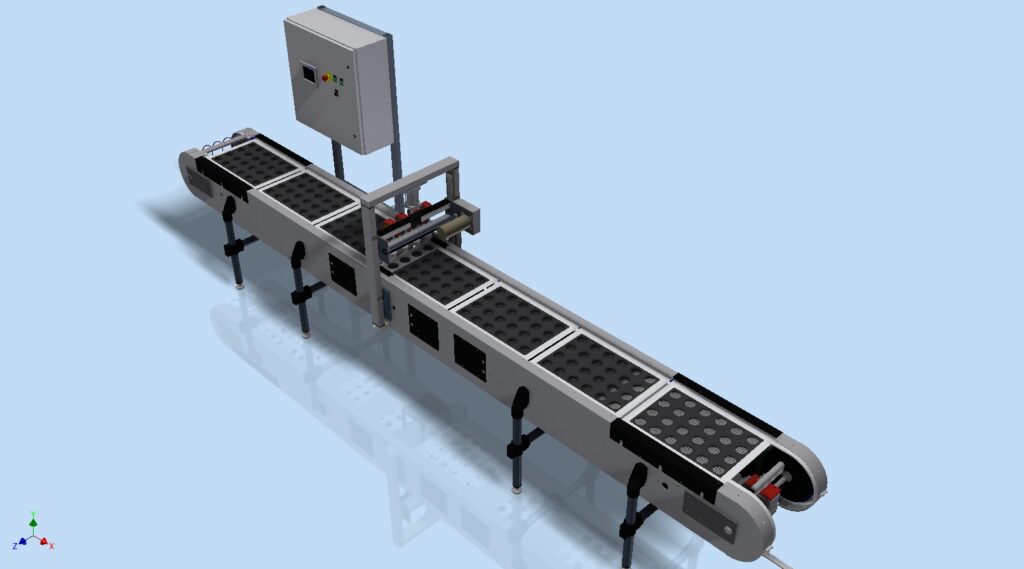
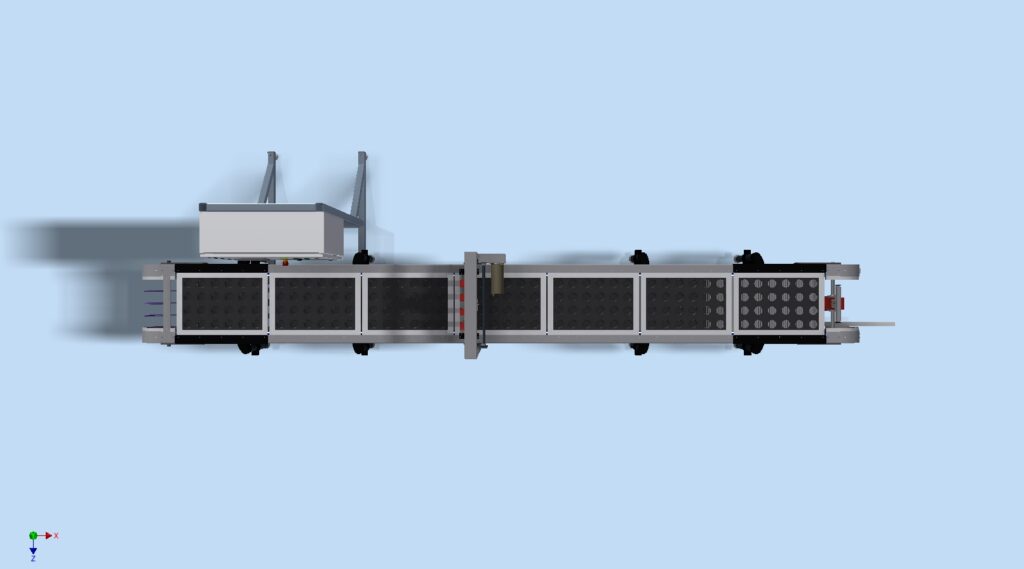
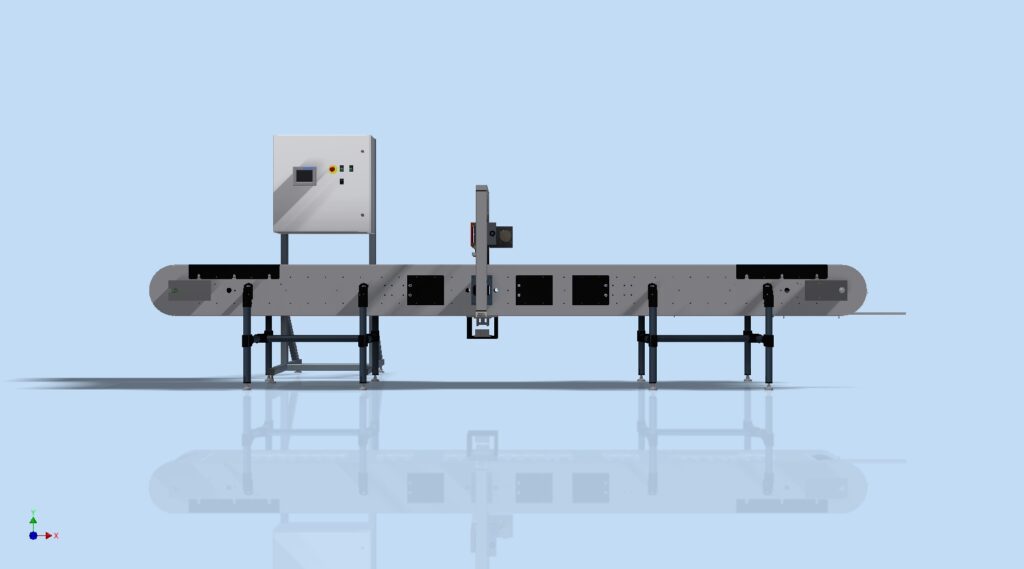
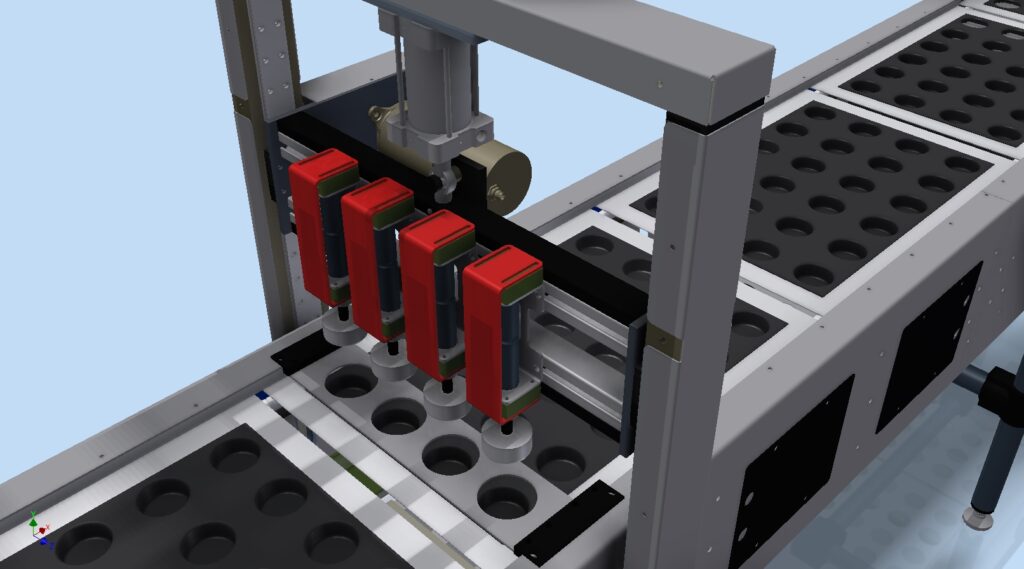
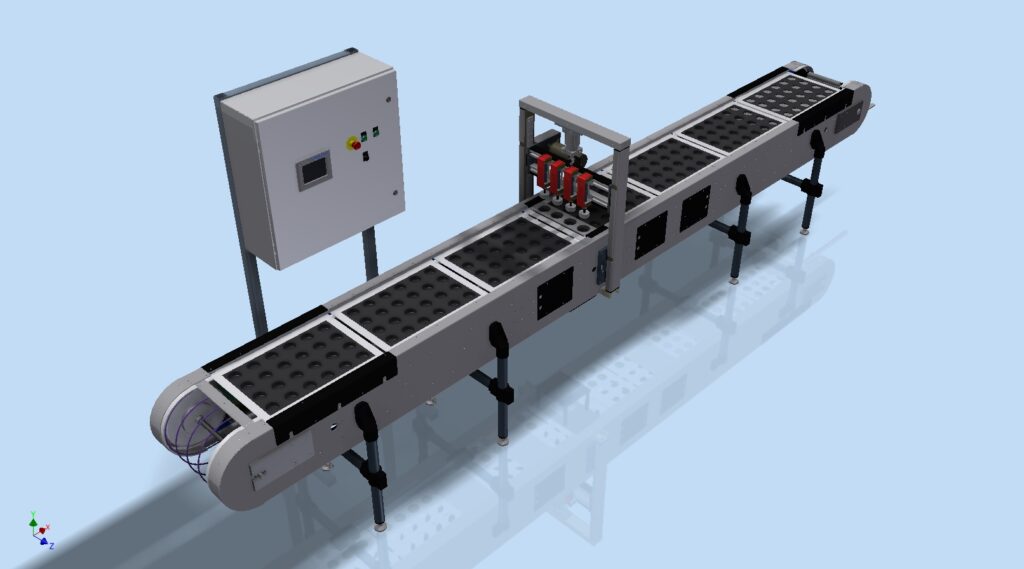
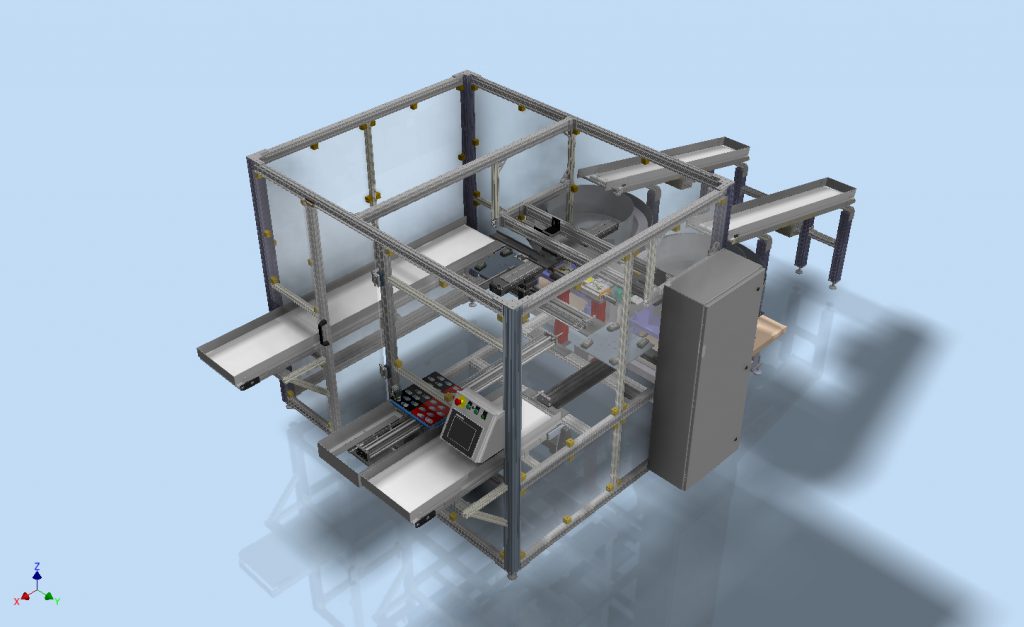
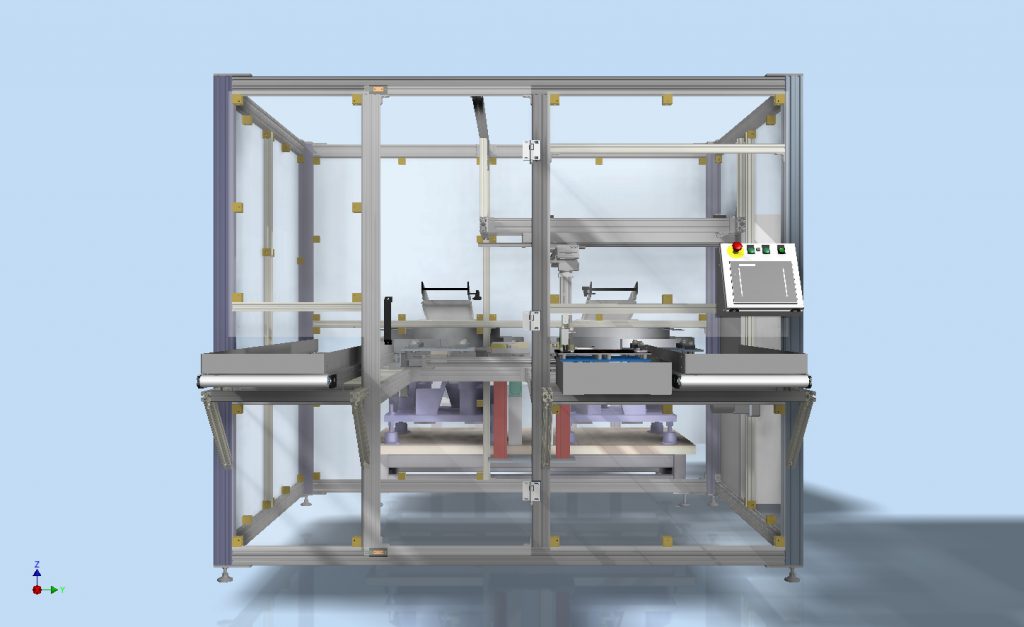
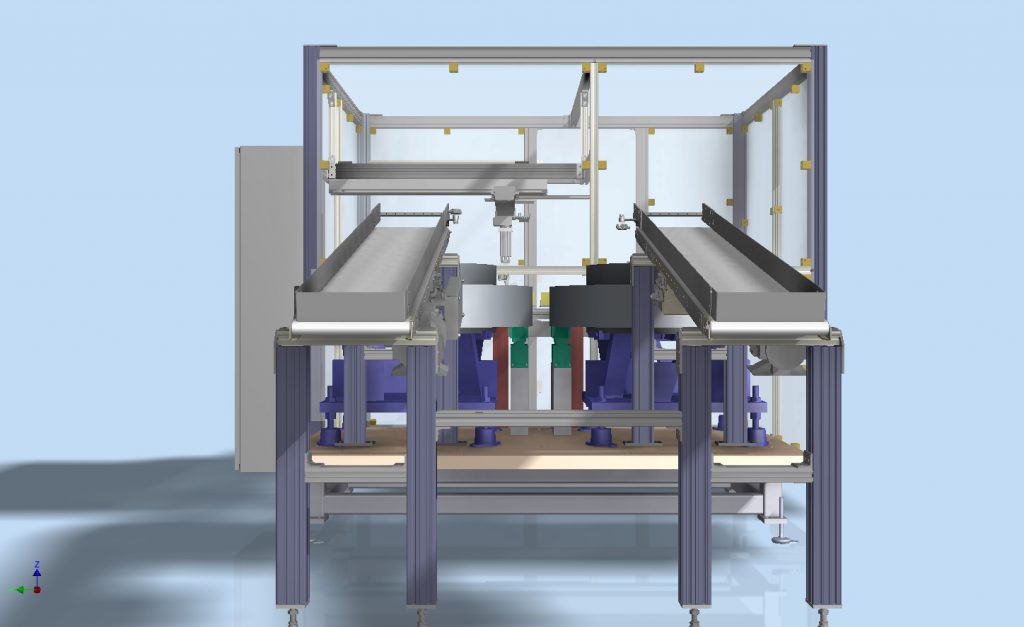
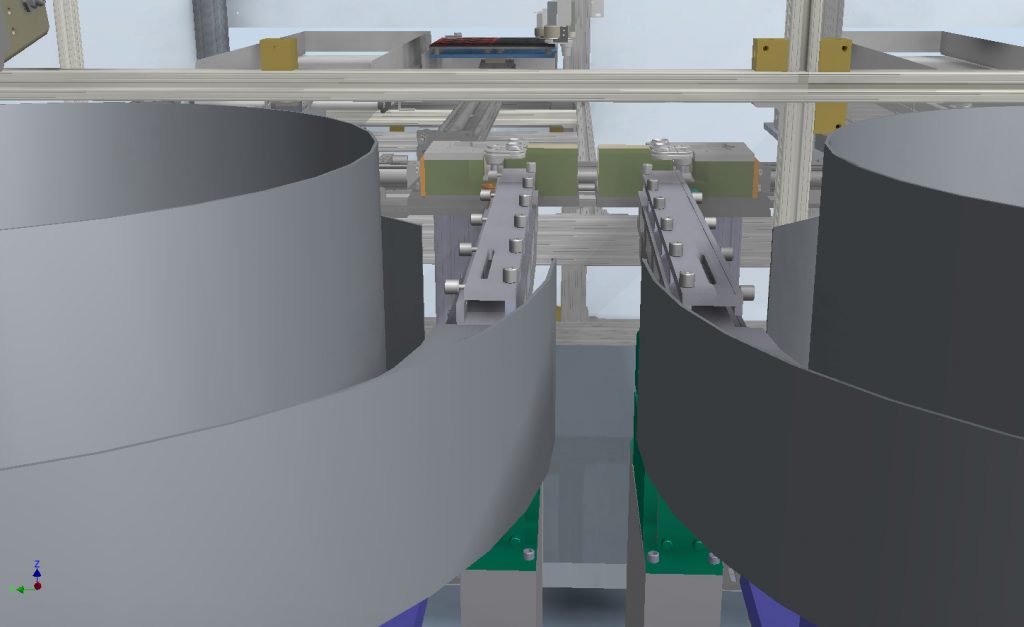
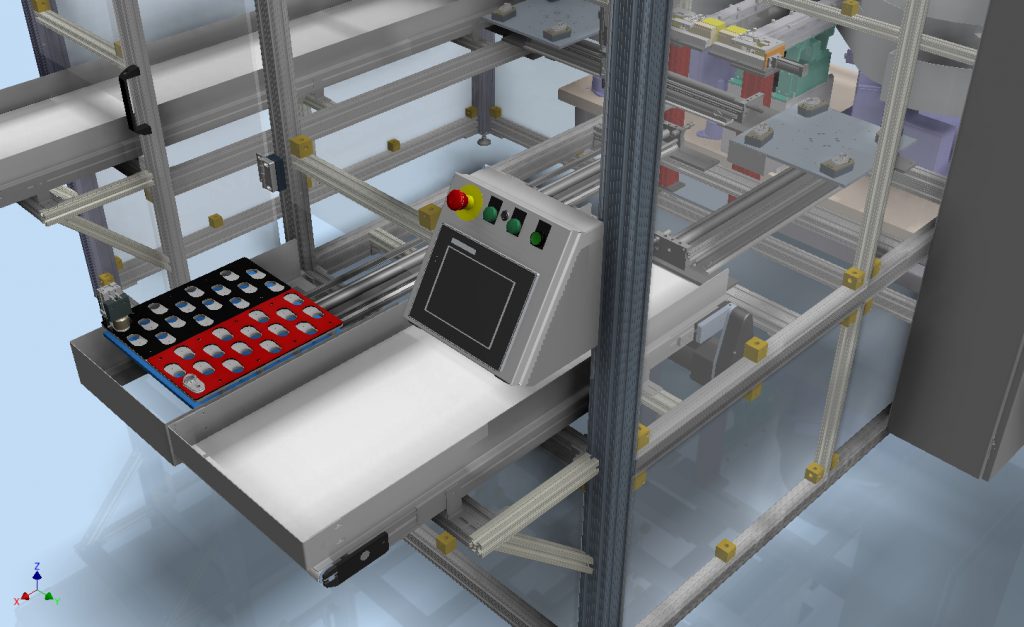
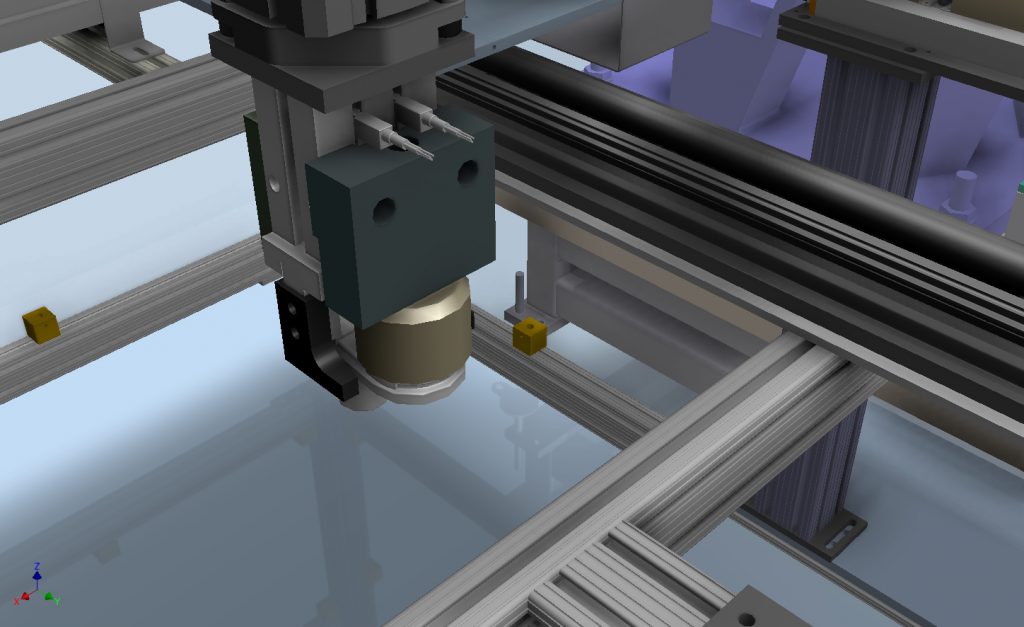
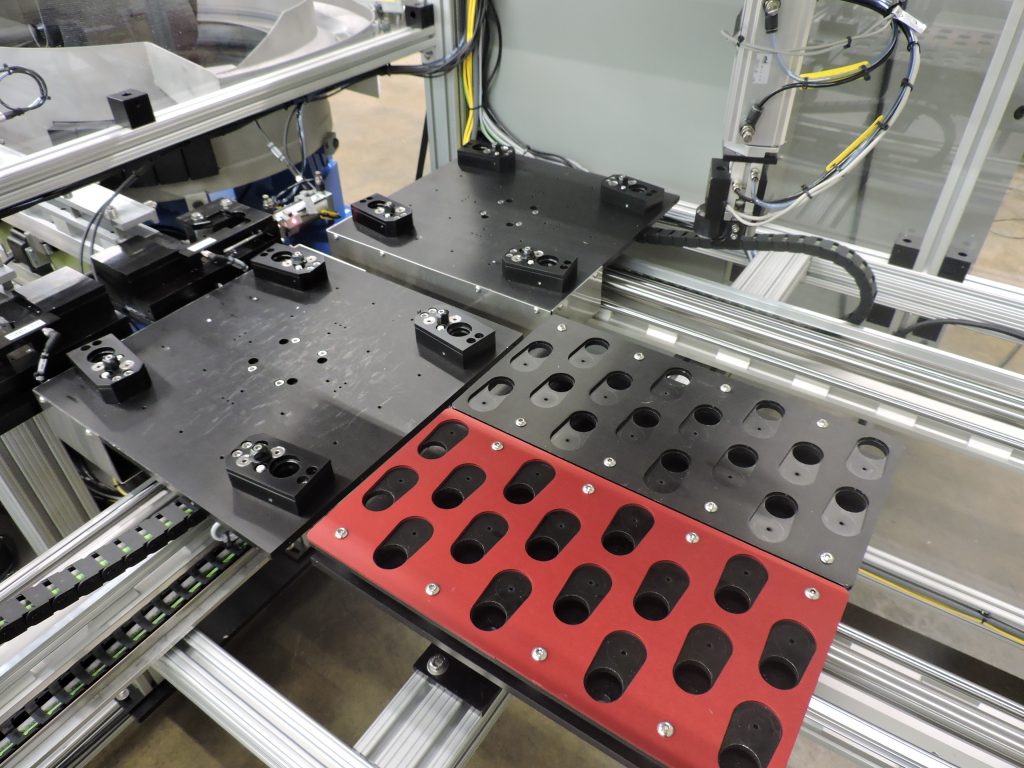
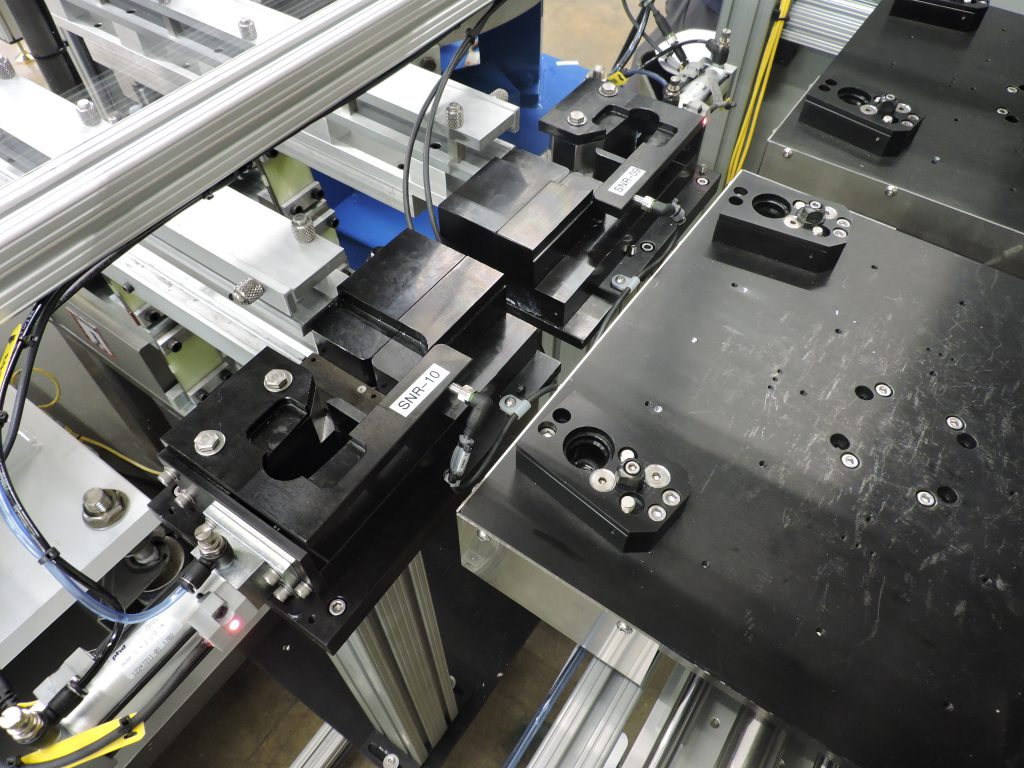
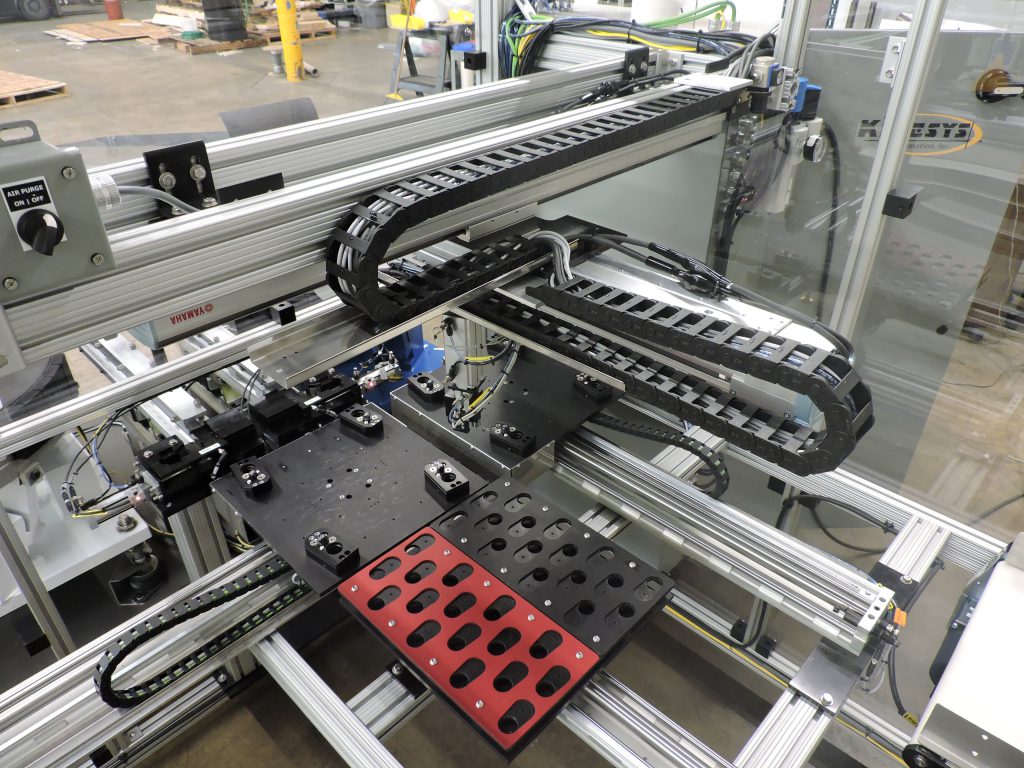
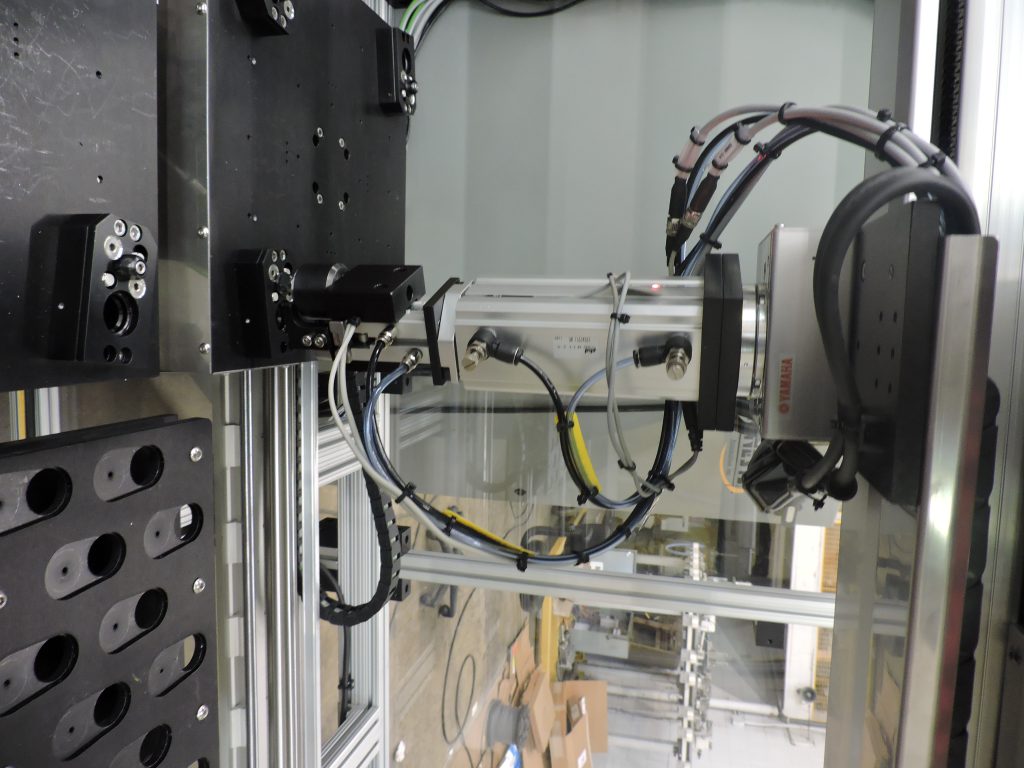
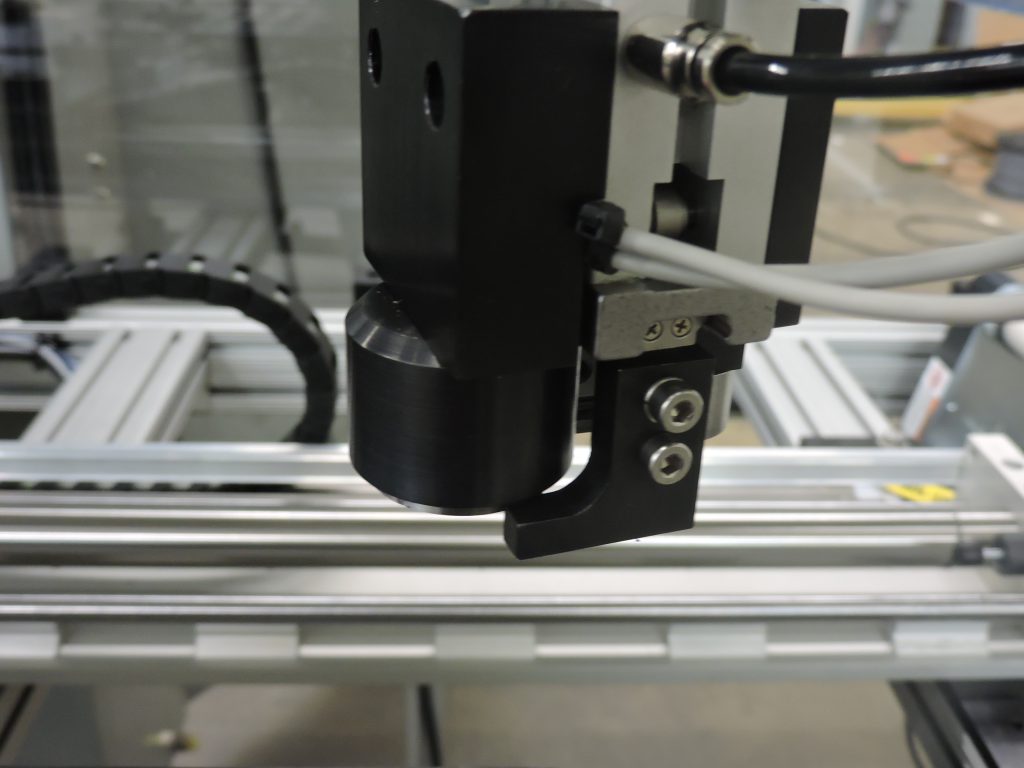
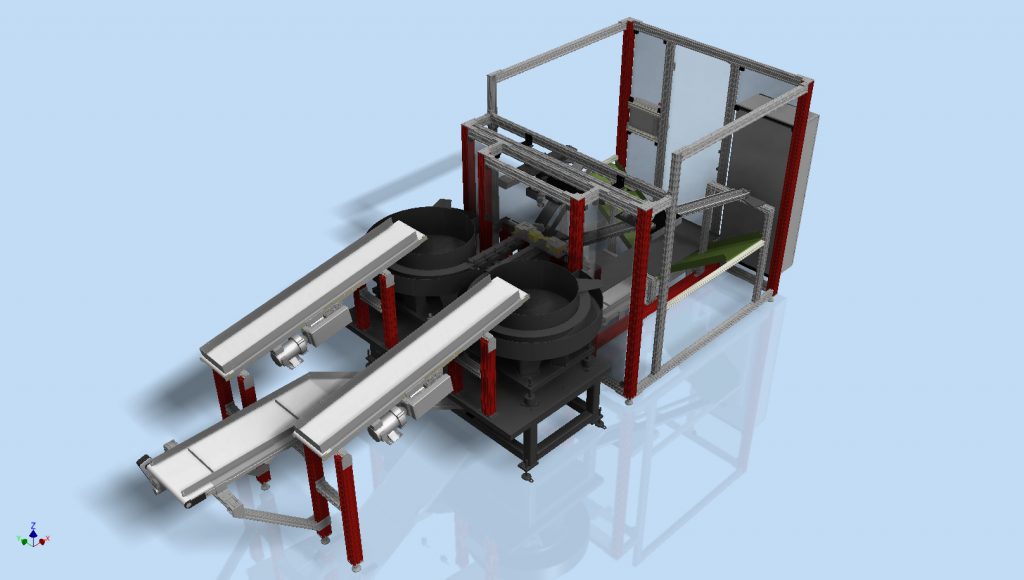
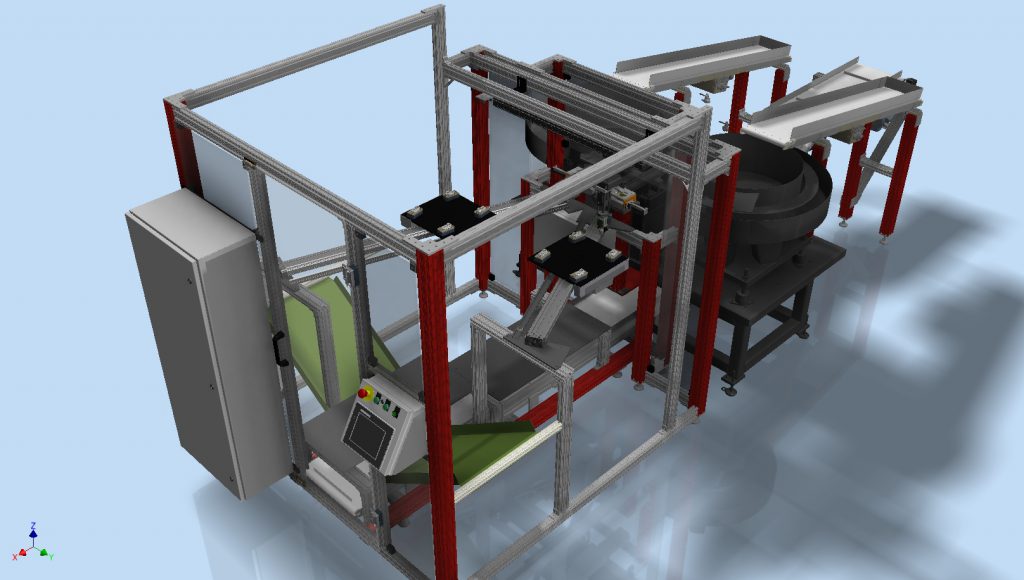
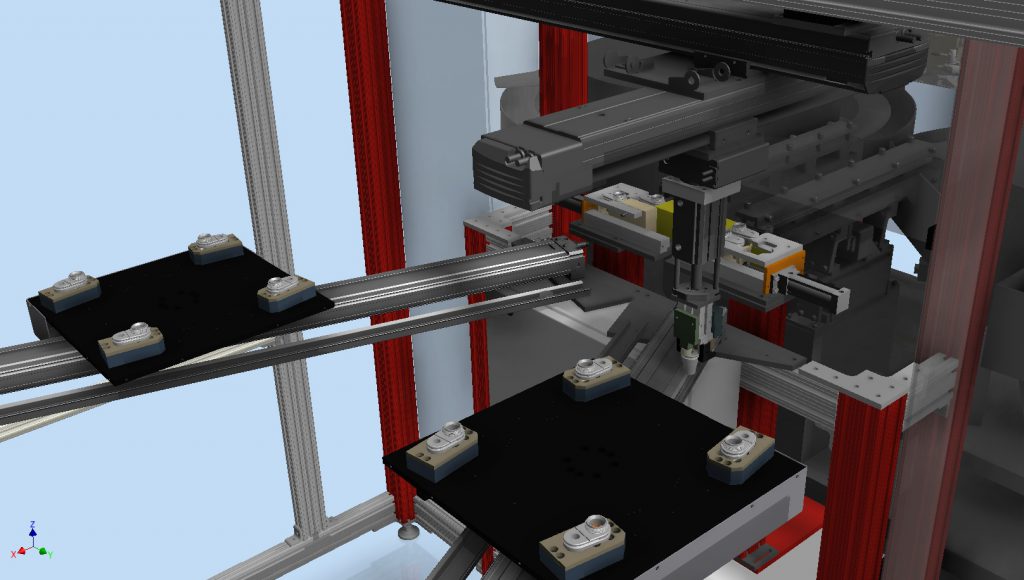
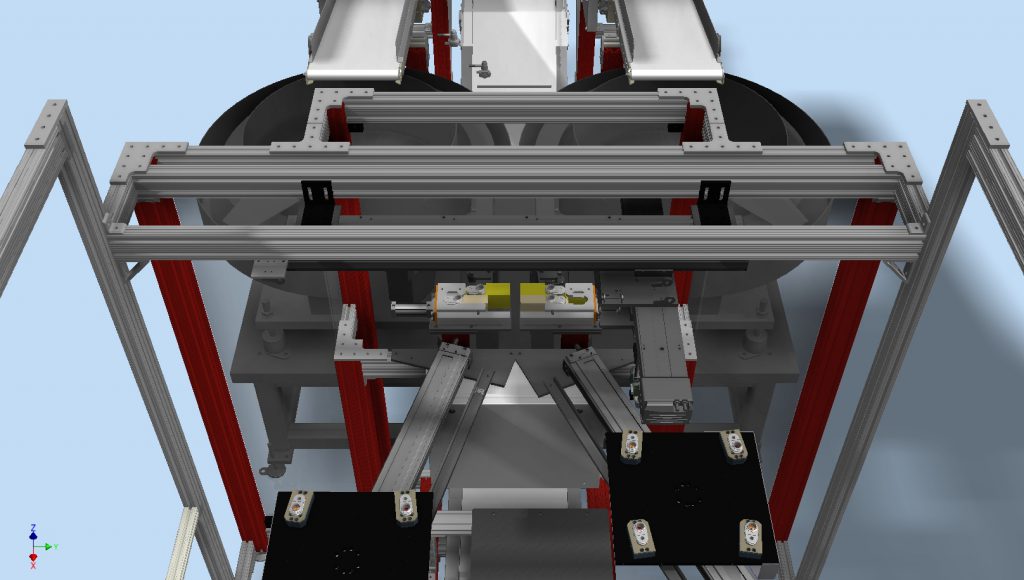
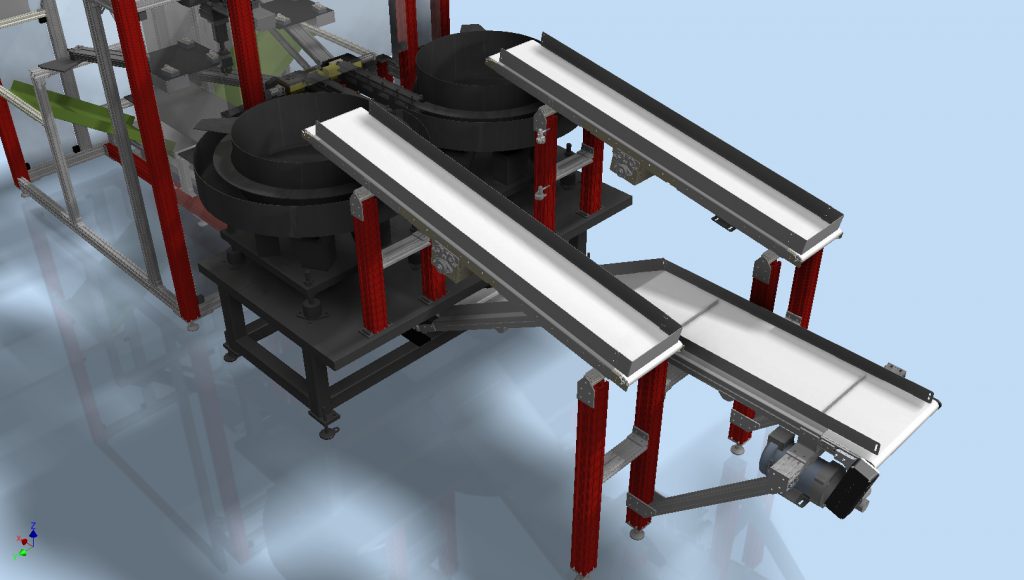
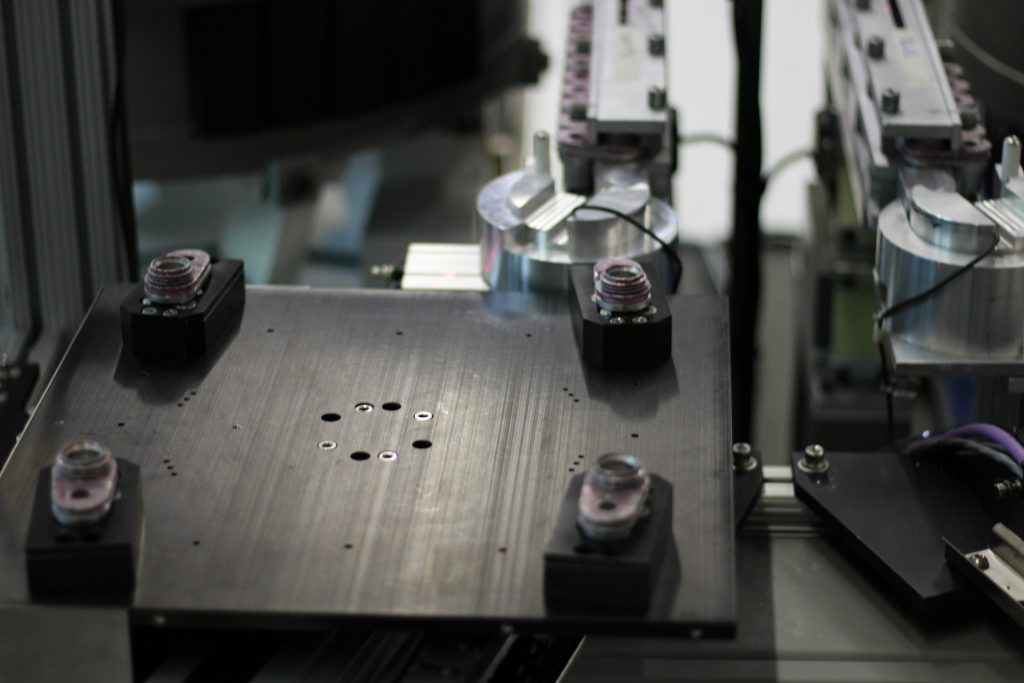
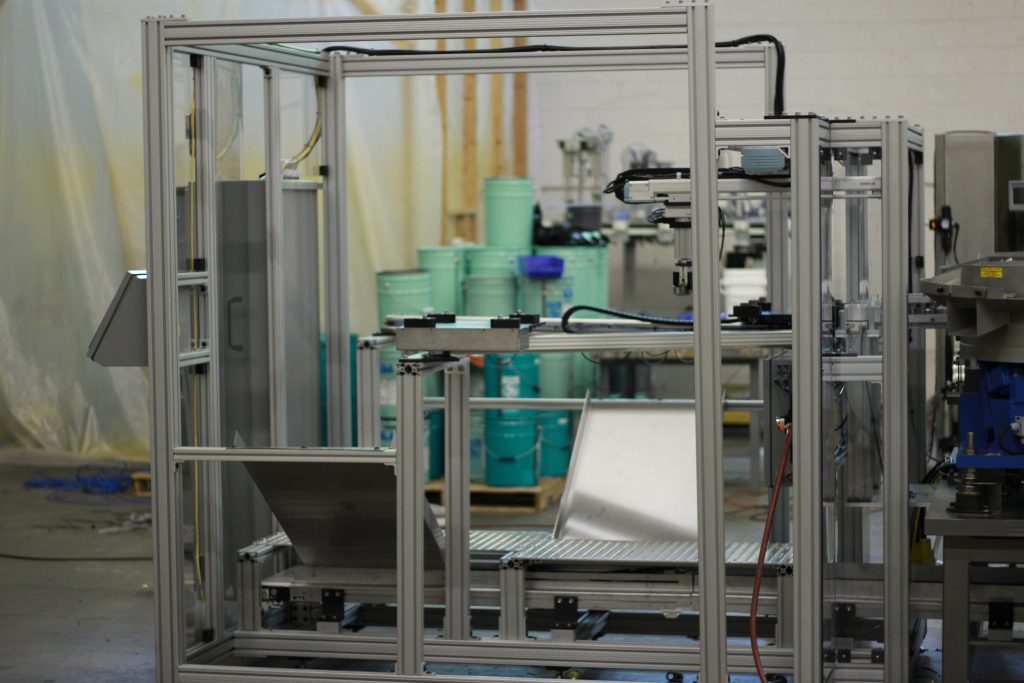
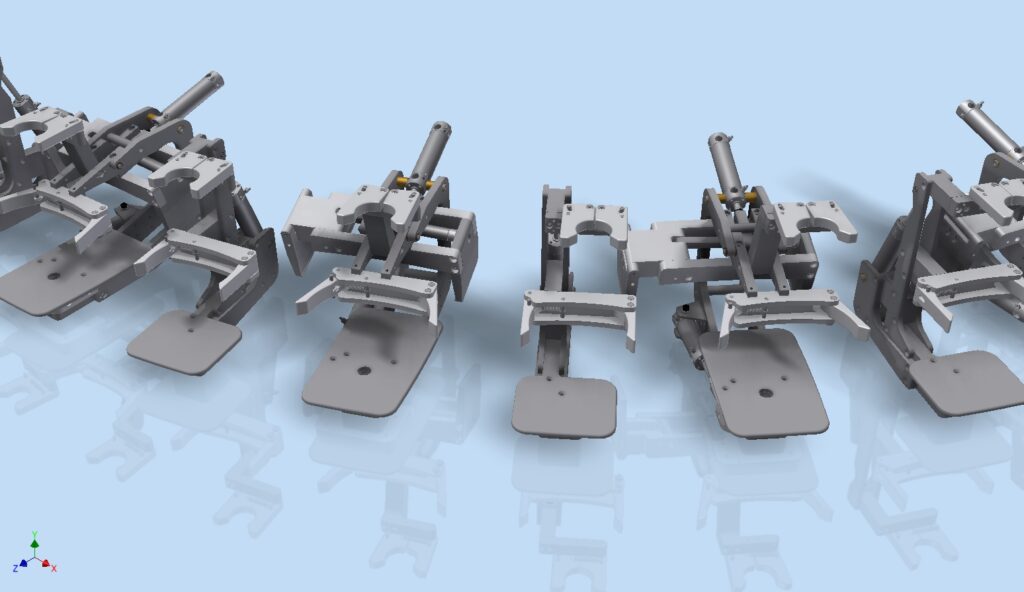
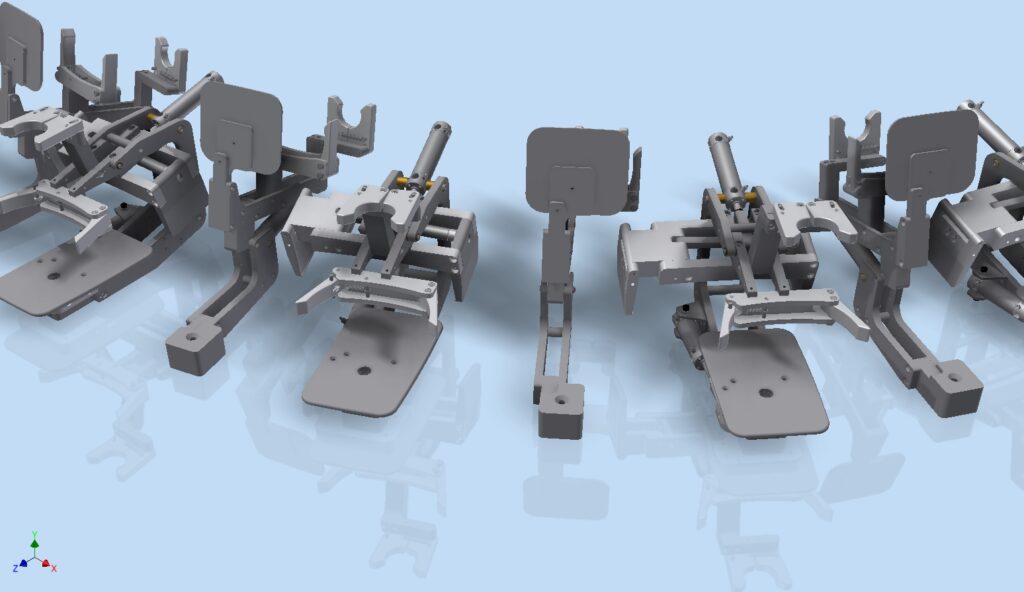
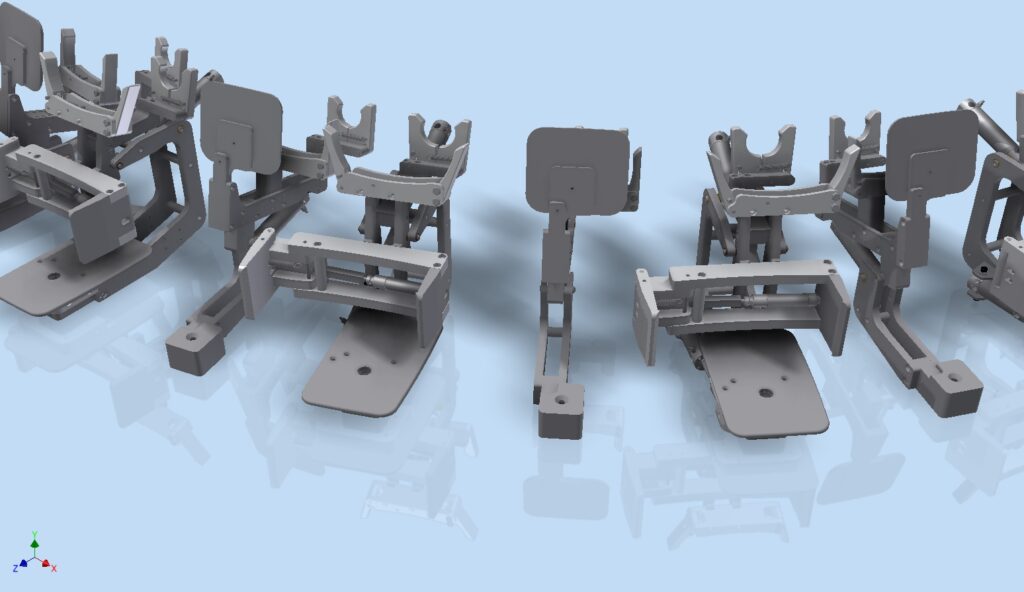
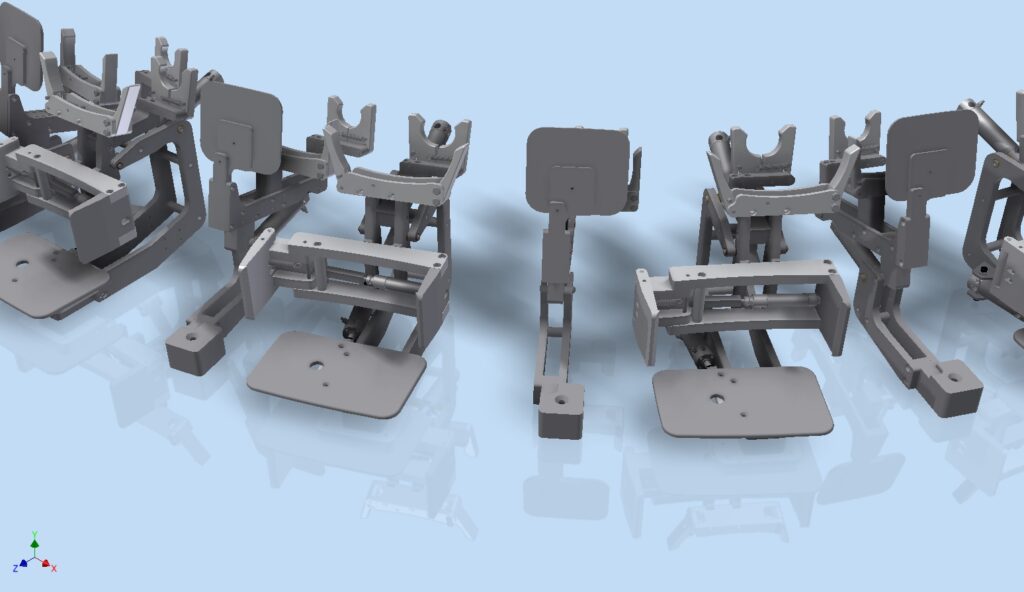
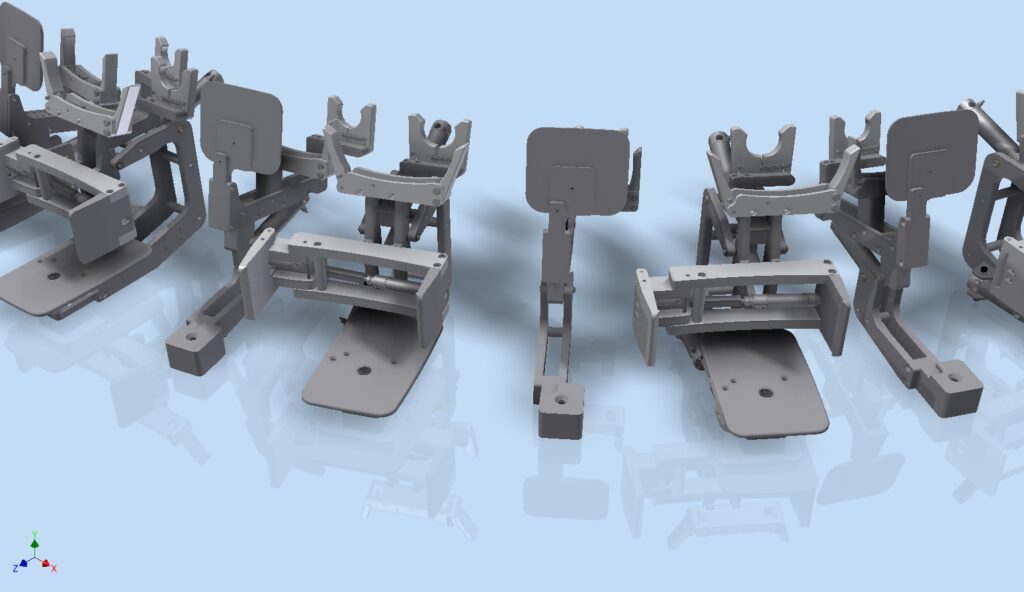
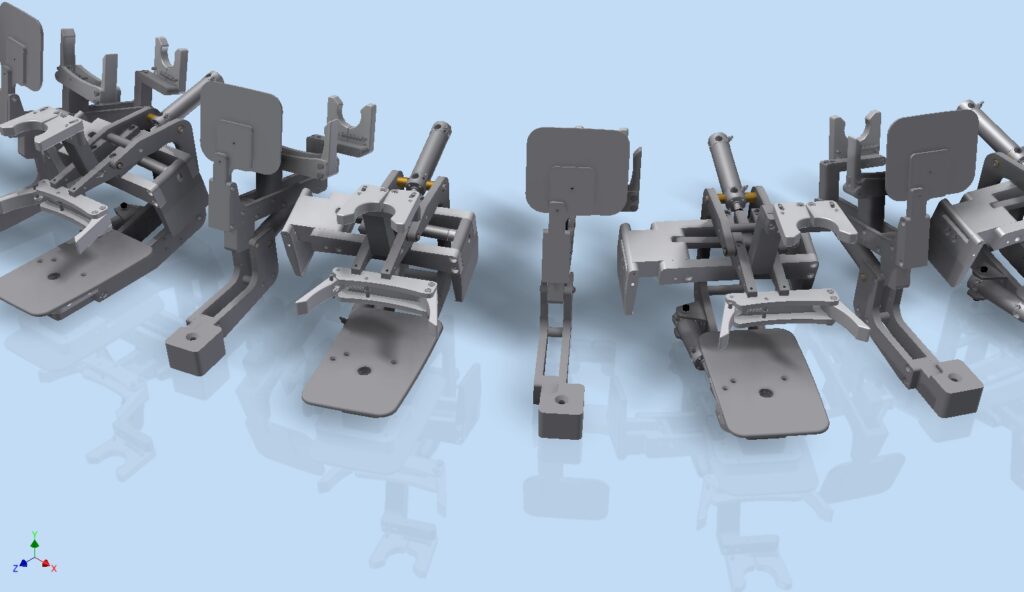
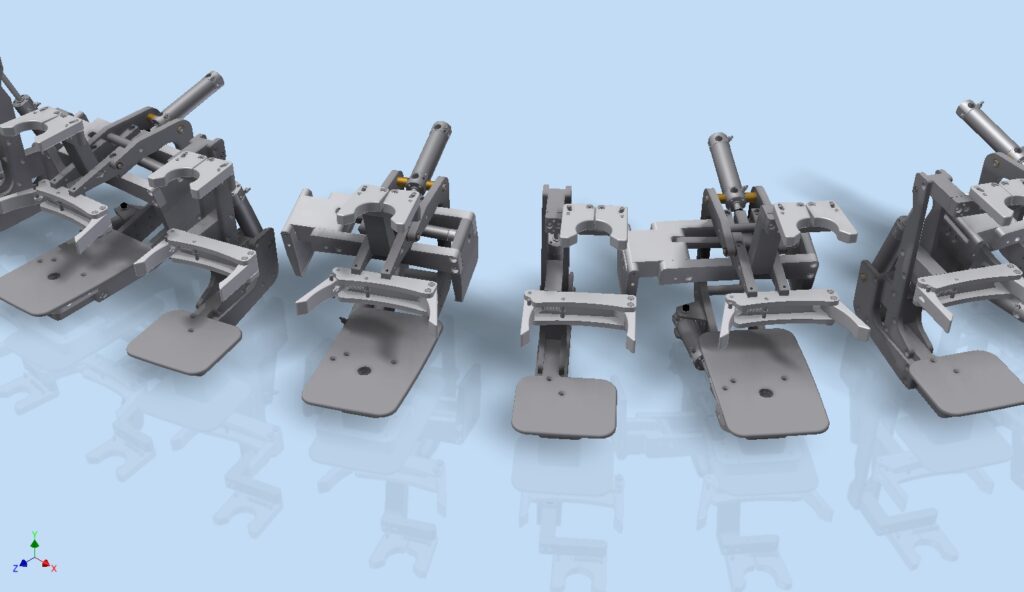
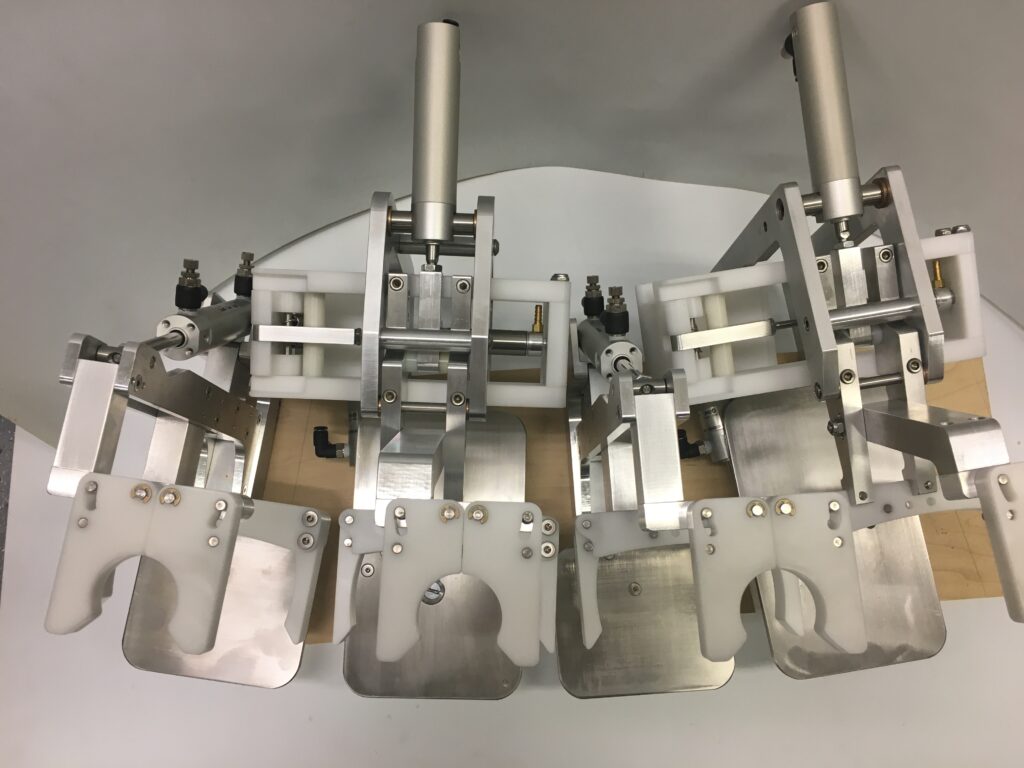
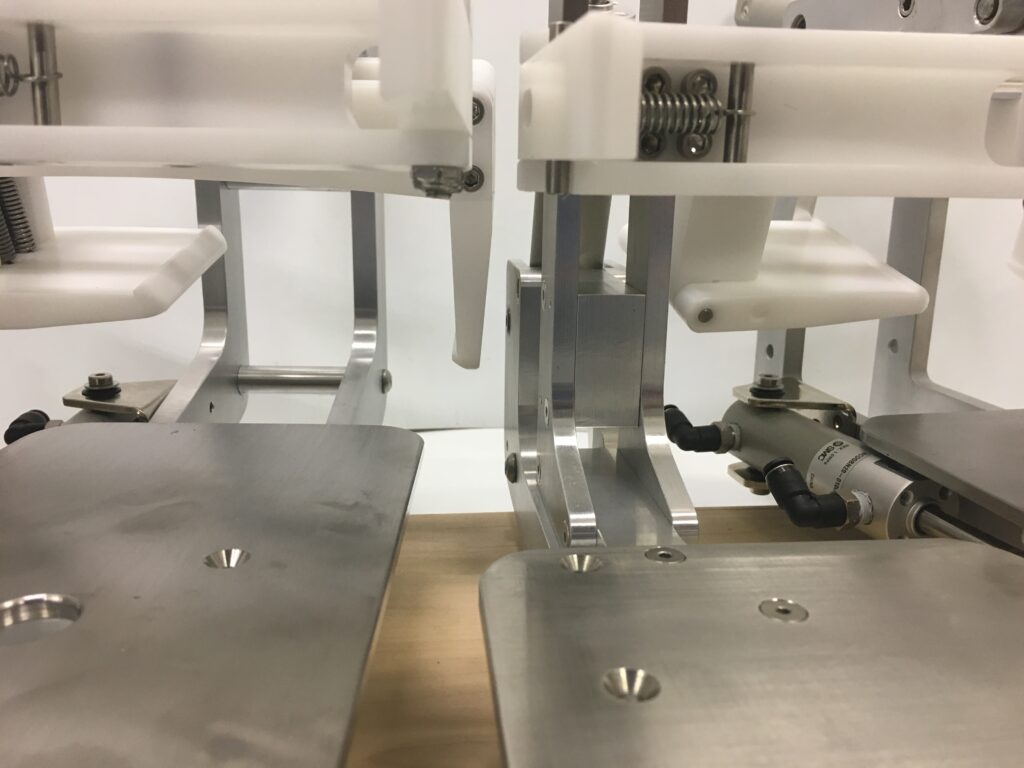
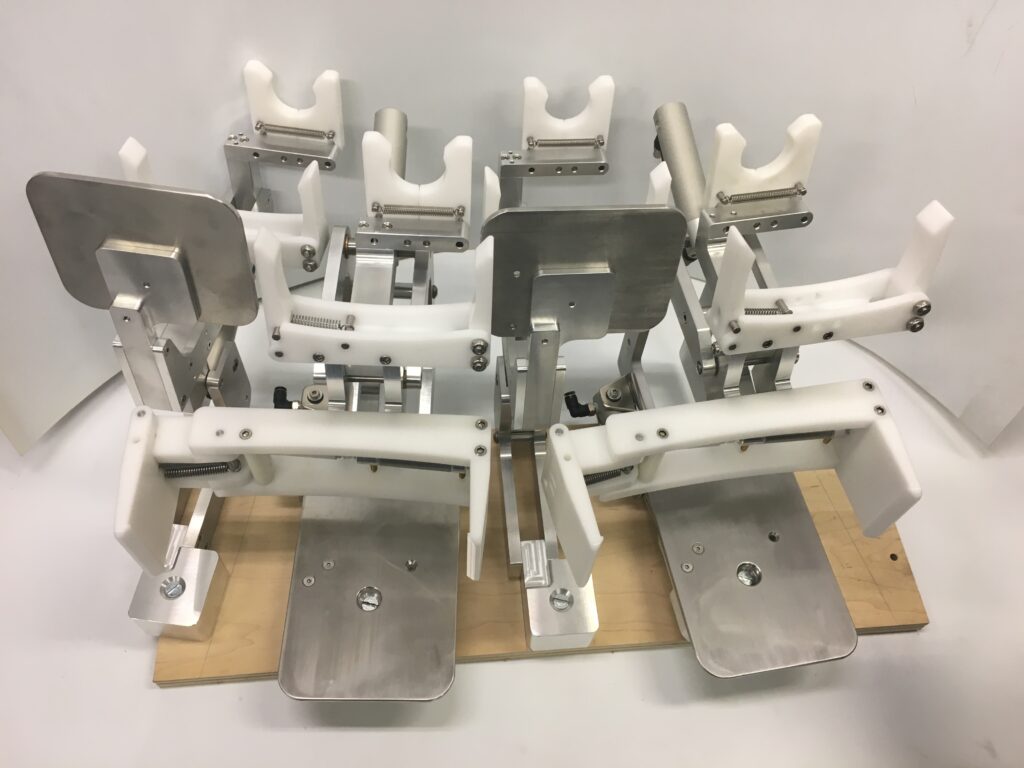
KA-17-004 – Kinesys Automation retrofitted the customer’s existing filler with custom nests that hold a family of plastic containers while being filled by weight. The 36 station filler is equipped with a set of alternating nests. One set of nests is dedicated to a small size container, while the second set of nests transforms to accommodate both a small and large size container. During filling of the small container all 36 nests are used, whereas when filling the large size container one set of nests is moved out of the way and the second set of nest transform to accommodate the large container.






 new")